
픽스호크를 제어하기 위한 툴로는 미션플래너를 사용하였다.
이역시 펠콘샵 유튜브를 보면서 참고하면서 틈틈히 배웠다.
https://www.youtube.com/watch?v=2z6hNdNp8i0&t=1904s
google에 미션플래너를 검색한 후에, 최신버전을 설치해주면 된다.
아래 링크 참조!
https://ardupilot.org/planner/docs/mission-planner-installation.html

펠콘샵 유튜브가 잘 되어있긴 하지만, 드론,수신기 모듈도 다 다르고 미션플래너 버전이나 이런것들이 다 다르기 때문에 참고만 하면서 내 프로젝트에 맞게 세팅을 해주었다.
1. 초기세팅
나는 프로젝트 진행을 위해 1.3.75 버전의 미션플래너를 사용했고,
날개가 4개이기 때문에 copter 4.0.7을 사용하였다.
아직까지 텔레메트리는 사용하지 않았고
프레임 유형은 X자 쿼더콥터로 사용하였다.
연결한 후에 , 우측상단의 COM4라고 되어있는 부분을 확인할 수 있는데 통신속도를 맞춰 준 이후에 연결하기 버튼을 누르면 미션플래너와 픽스호크가 성공적으로 연결된다.
처음에 연결이 안되었었는데.. 선이 이상했던 탓인지 다음날 해보니까 정상작동했다.
2. 무선교정 / 조종기 캘리브레이션

우선 조종기(송신기) 픽스호크가 송수신이 잘 되는것을 확인해야 한다.
연결이 잘 된다면, 조종간을 최대,최소로 움직이면서 값이 정상적으로 전달되는지 체킹하면서 최대,최소값을 지정하여 주고 모드도 3개로 잘 동작되는지 확인한다.
이 과정에서 만약 유튜브영상과 다르게 동작해서 변경하고 싶다면 미션플래너가 아닌 송신기에서 바꿔주어야 한다! 프로젝트 진행하면서 이게 맞지않아 바꾸는데 고생했다.
사용했던 devo7같은 경우 저렴하지만 바꾸는걸 찾는게 어려워서 고생했었다. 돈이 많다면 꼭 좋은 송신기를 이용하길 ㅠㅠ
그 이후, 캘리브레이션을 통해서 4개의 모터출력세기를 맞춰주는 작업이 필요하다. 상승했을때 네 모터출력이 같은지 확인 및 조정작업을 해주는 것이다!
캘리브레이션 하는 동작도 위 펠콘샵 영상에 나와있다. 유튜브 없었으면 못했을것 같다
송신기 이야기를 조금 더 하자면 나는 모드1을 사용했지만, 모드에 관한 설명은 아래 링크를 참조해보는것이 좋을 것 같다. 설명을 자세하게 잘해주셨다.
https://y-daily.tistory.com/39
드론 조종기 모드 조종방법 및 조종기 키에 따른 정확한 명칭 알고가기.
드론 조종기에는 모드 1 ~ 4까지 조종방식이 사용되어지고 있습니다. 요즘 시중에 출시되고 있는 드론들 대부분은 모드2를 사용하고 있으며 RC를 하셨던 분들은 간혹 모드1 방식을 사용하여 드론
y-daily.tistory.com
3. 가속도 교정
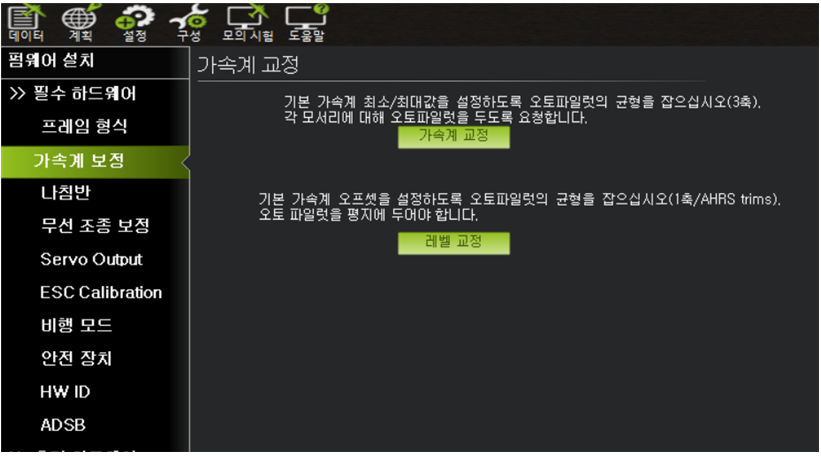
드론 방향 기준 가속도 센서를 설정하는 것으로, 드론을 좌,우,앞,뒤 뒤집기 순서로 이리저리 굴려가면서 가속도 센서를 맞추는 것이다.
4. 비행모드 설정

Devo 7 조종기에서 Mix스위치 단자로 3단계를 설정할수 있는데 원래 설정되어 있는 gear스위치는 2단계까지밖에 설정을 하지 못한다 ㅠㅠ
그래서 gear스위치 역할을 mix스위치로 하게 설정해두었고, 1,4,6번모드를 각각 설정하게 되어 Stablize,altHold,Stablize 모드 세 가지로 설정하게 되었다.
비행 모드에 관한 설명은 아래링크를 한번 들어가보면 자세히 알 수 있다.
픽스호크(Pixhawk) 비행 모드 일람표 | 世路少知音
구분 비행 모드 GPS 필요 설명 추천(기본) 비행모드 Stabilize – 피치,롤,요,스로틀 모두 사용자가 조작 – 모든 키가 중립이면
www.evergray.kr
5. 나침반 설정

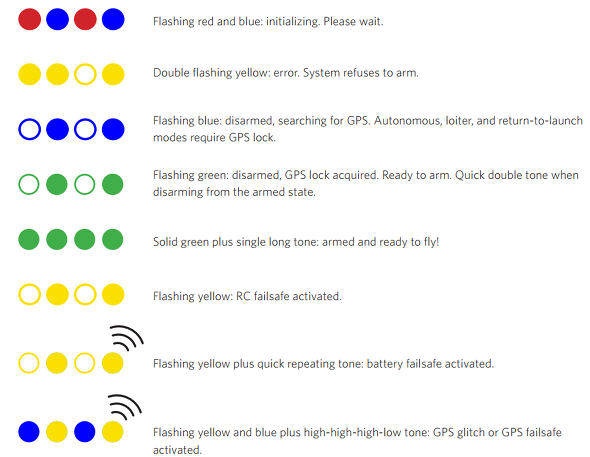
픽스호크 내부에도 GPS가 존재하고, 외부에도 따로 GPS를 달아준 상태인데, 픽스호크 내 GPS를 사용하지 않고 외부 GPS를 사용하게 설정하는 작업이다. 참고로 건물 내부에서 드론을 만든다면, GPS가 잡히지 않는것이 정상이다. 미리 살짝 쓰자면 시동준비가 되었을때 GPS가 연결되면 초록불이, GPS가 연결되지 않으면 파란색불이 깜박인다. 즉, 파란색 불이 들어오는건 시동준비가 걸렸다는 증표이다.
6. 안전장치 설정
신호가 끊겼을 경우 자동으로 돌아오게 하는 Return To Launch기능을 설정하는 과정이다.
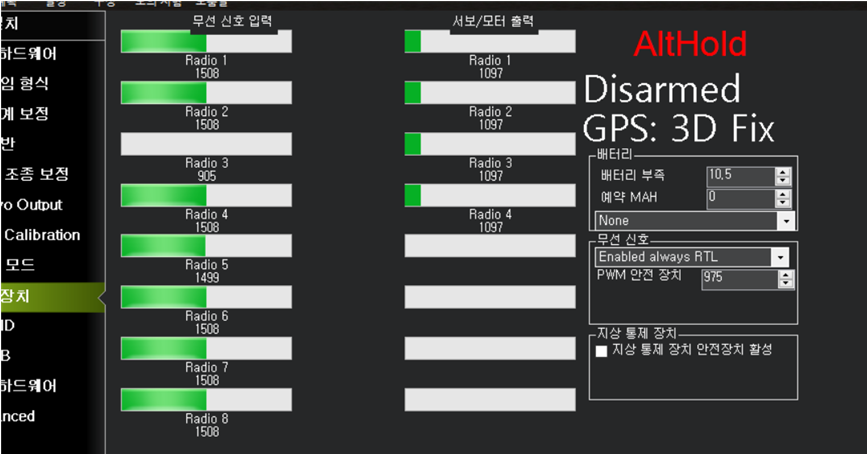
7. 배터리 알림창

배터리 감시자를 통하여 현재 배터리가 연결되면 %를 표시할 수 있게 할 수 있는데 우리 픽스호크에선 어째서인지 배터리 감시자 2에서만 배터리가 감지가 되고 그래서 화면에는 표시되지 않는다. ㅠㅠ.. 구글링으로 아직 해결을 못했다.. 하지만 비행하는데는 큰 이상이 없다.
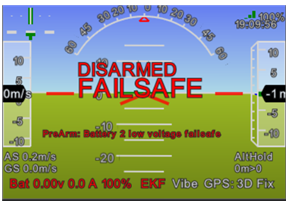
위 그림처럼 GPS 모드 등은 다 정상적으로 연결되나, 배터리가 없다고 뜬다 ㅋㅋ
8. 모터 시험

모터가 정상작동하는지 테스트해보는 과정이다. ABCD순서대로 눌러서

위처럼 방향이 맞게 동작하는지 확인하면 되겠다. 맞지않으면 픽스호크에 연결된 변속기의 순서를 위 그림처럼 맞춰주는 과정이 필요하다.
위 과정이 끝나고 송수신기와 픽스호크, 드론의 본체의 전원을 모두 켜면,

위 와같은 두 상태중 하나가 뜰 것인데, 위에서 잠깐 설명했듯이 파란색은 GPS가 연결이 안된 상태, 초록색은 연결이 된 상태이다. 이상태에서 조종기를 보통 우측하단으로 놔두면 시동이 걸릴 것이다!!
픽스호크의 점등에 관한 정보는 아래와 같다

사실 위처럼 드론을 띄우는데 엄청난 일들이 많았다. ㅠㅠㅠ 계속 시동이 안걸리고 logging failed라는 알수없는 오류가 떴었다.
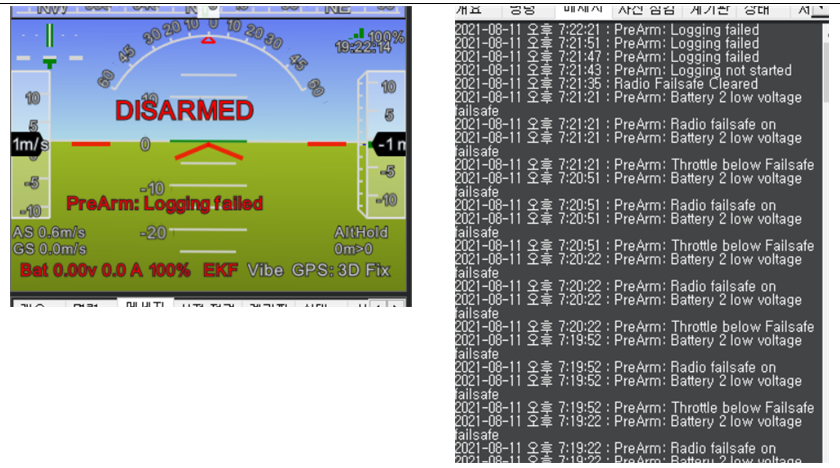
해결하려고 드론교육장도 가고.. 구글링도 엄청하고 그랬는데 결국 못찾았던 문제였었고, 처음부터 모든과정을 수행도 몇번을 해봤었던것 같다..
거의 이문제때문에 3주~1달정도는 날렸는데 매개변수에서 logging을 그냥 채크해제를 해서 문제를 해결했다... 문제해결은 과의 교수님이 큰도움을 주셔서 겨우 해결했다.
'프로젝트 > 주차단속 드론' 카테고리의 다른 글
| 라즈베리파이로 드론 조종하기 (1) | 2022.05.19 |
|---|---|
| 라즈베리파이와 픽스호크 연동 ( pixhawk 2.4.8 ) (2) | 2022.04.30 |
| 라즈베리파이 Opencv설치 (2022 기준) (7) | 2022.04.28 |
| 02_드론만들기_프레임 (4) | 2021.11.11 |
| 번호판인식 영상처리 (3) | 2021.11.04 |